



 通过认证
通过认证 

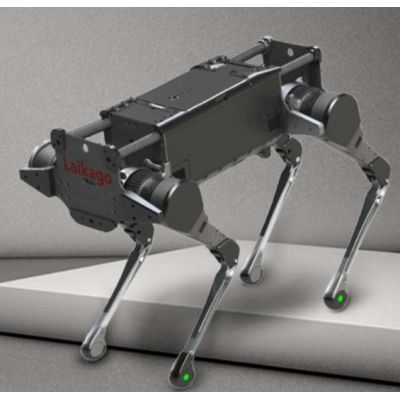
Mini是一款通用型灵巧版智能四足机器人产品,产品由机器人主体、驱动系统、控制系统和视觉感知系统组成,其腿部采用仿生运动步态,具备行走、溜步、跑步等运动能力,每条腿有三个运动关节,每个关节由一个电机驱动。
绝影Mini开放控制协议,是一个可进行二次开发的智能机器人系统平台,主要应用于机器人学科相关实践教学、机器人竞赛以及机器人技术相关科研项目研究及实验室平台建设。


|
公司基本资料信息
|
|||||||||||||||||||||||||||||
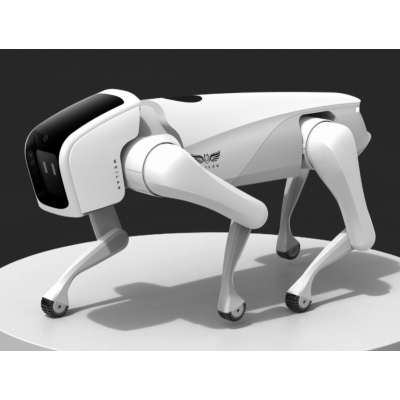
Mini是一款通用型灵巧版智能四足机器人产品,产品由机器人主体、驱动系统、控制系统和视觉感知系统组成,其腿部采用仿生运动步态,具备行走、溜步、跑步等运动能力,每条腿有三个运动关节,每个关节由一个电机驱动。
绝影Mini开放控制协议,是一个可进行二次开发的智能机器人系统平台,主要应用于机器人学科相关实践教学、机器人竞赛以及机器人技术相关科研项目研究及实验室平台建设。