
 资讯
资讯
当你闭上眼睛之后,即使一片漆黑,但你还可以通过肢体的感触,来感知这个世界,想象一下这是一种怎样的体验,
现在人工智能越来越发达,机器人也有同样的能力了。
这个年代,是一个高科技的时代,机器人的发明已经不是什么新鲜的事情了,而且大多数的机器人都是通过电力驱动的。
科学家们发明的机器人都是以一种不灵活的冷冰冰形象出现,因为它们那看起来非常僵硬的身体无法灵活的根据环境来工作,所以这种机器人就被称为是刚性机器人,但随着科技越来越发达,它们正在积极转型成为软体机器人。
此前,机器人大多通过运动相机、激光雷达系统以及算法来获取并生成环境三维信息。
但这种视觉系统对于现在的机器人新贵——软体机器人来说似乎不太适用。

▲ 来自哈佛大学的软体机器人
软体机器人因骨骼惊奇、身体柔软,可以穿梭于一般机器人难以触达的地方,但是对于在这些「犄角旮旯」里面如何探知三维空间,如何对外界环境做出精确的建模却一直是个问题。
一款新出的机器人,不需要用电就能使其移动,而是采用了一种折叠方式,这是怎么做到的呢?我们一起来看看吧!
就在前段时间,哈佛大学的Wyss研究所像大众展示了他们的一款软体机器人,这个受折纸启发发明的软体折叠机器人叫Rollbot,它的长相非常简单,但它确确实实是一个名副其实的机器人。

除此之外它的体型非常小,就是一张小卡片,可是一旦将这张小卡片放到桌面上,它就能折叠往前跑。这是因为它是由一种叫液晶弹性体的活性材料制成的,与热表面接触时就会折叠成五角轮自动前进,所以纸片能够自己动起来不是因为活见鬼了,而是有一定的科学原理的。
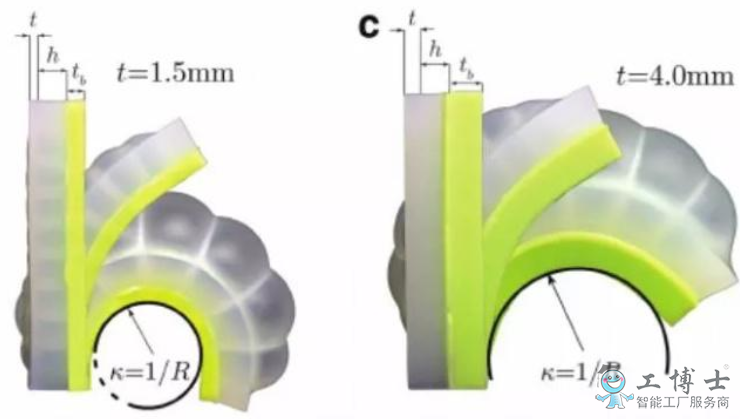
纸片下面的板子也不是一块普通的板子,它的温度达到了200摄氏度,这是为了给纸片提供一个热环境。纸片通过折叠往前走,又是如何控制自己的运动方向呢?其实是有一定的规律的。

因为纸片的折叠位置是一个个在不同的温度下可以进行折叠的3D打印软铰链,其一侧在与热表面接触时就可以折叠,然后推着轮子转向下一侧,只要离开热表面,就恢复成原状,如此循环下去。
这样一个完整的操作过程实施下来,研发人员就可以对温度、铰链的弯曲程度、折叠方向进行系统的编程,然后来控制纸片的运动形式,这样就可以按照一定的轨迹前进了。
大多数的软体机器人其实都需要依靠外部电源来进行控制的,但Rollbot却走了一个新路线,完全摒弃掉电线,不用电就能灵活地改变自身的形状来适应环境,这将为以后的机器人事业打造出了一条很有前景的道路。

太空探索,救援等多功能软体机器人
据哈佛大学约翰·A·保尔森工程与应用科学学院(下称SEA)官网和Tech Explorist报道,6月2日,哈佛大学约翰·A·保尔森工程与应用科学学院(SEA)的研究人员开发出了最新型的软体机器人,它可以应用于太空探索、搜索和救援系统、仿生学、医学手术与康复等领域。
这款新型机器人由空气驱动,并用一个输入器代替了多个控制系统,使机器人在不受约束的同时,还能简化控制、减轻重量。

图片来源:Bertoldi Lab/Harvard SEAS软体机器人被业内视为机器人技术的未来,相较于硬性机器人而言,它有可挤入狭小空间、碰撞后能尽快恢复等优点。
但目前来说,软体机器人在设计上仍有许多局限。其中最大的一个问题就是,软体机器人通常需要拴在输入线上,这意味着它们必须通过提供压缩空气的管道和控制其系统的电线与外部设备相连。但这些管道和电线在很大程度上束缚了软体机器人功能的发挥。
而如今哈佛大学研发的这款软体机器人,则可将其驱动过程大大简化,从而解决这一难题。
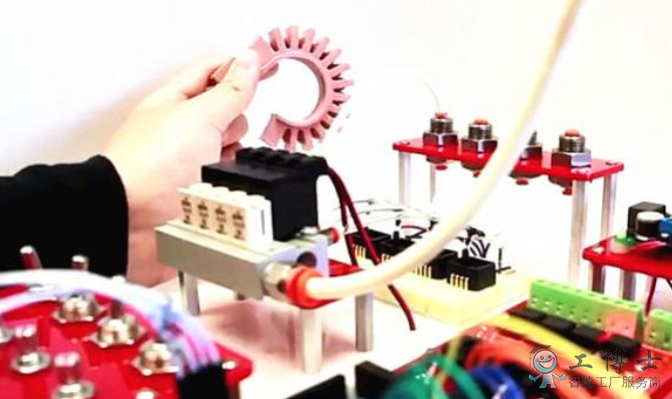
该机器人被设计成十字形,有四条“腿”,每条“腿”都相当于一个执行器,各执行器上含有八个由细小通道连接的气室,顶部则留有七条接口,用于接通输送压缩空气的管道。

图片来源:Bertoldi Lab/Harvard SEAS这项研究论文发表在《软体机器人学》杂志上。
哈佛大学应用力学教授卡蒂娅·贝尔托迪(Katia Bertoldi)在论文中表示,该项研究首次提出了这种基于流体粘性现象来制造软体机器人的方法。使用该方法的软体机器人其驱动结构将比以往的更为简单、容易。
该方法通过使用不同直径的管子来控制空气在软体机器人装置中的移动速度,即一次性通过其中一个管泵输送相同数量的空气,管的大小将决定空气流动的方式和位置。
比如将三根直径为0.79mm、长度相同的管子接在机器人上,再接通一根直径为0.38mm的长管输送气流。它其中的一条“腿”就能充满空气并弯曲起来,而另外三根上接通的管道由于直径更粗并且长度相同,因此输送压缩空气的时间较短,其余三端可几乎同时鼓起落下。

图片来源:Bertoldi Lab/Harvard SEAS不同长度的管子分别接在机器人顶部的接口上,不同的粗细、长度和接通方式都会对机器人的运动方式有所影响。
例如将四条直径均为0.38mm,长度分别为78.6cm(输入空气)、10cm、43.7cm及122.4cm的管子配置于该机器人上,并将这些管子按顺序连接起来,接通压缩空气。
那么该机器人的执行器最终会按照设定好的顺序,即右-上下-左的顺序依次进行弯曲,从而向前爬行。

图片来源:Bertoldi Lab/Harvard SEAS如果将管子接口的位置和次序调换一下,执行器充气的顺序就会发生变化,利用这一方式,该机器人即可实现不同方向的运动。
此外,由于每个执行器的大小、厚度不尽相同,在输入等量空气时,弯曲的程度也不同,因此运动的距离也会有所差别。
但由于输入压缩空气的速度与量是不变的,调控管子就能够决定空气输送的位置和顺序。因此它不再需要复杂的空气压缩计算和控制。
图片来源:Bertoldi Lab/Harvard SEAS研究人员尼古拉斯·瓦西奥(Nikolaos Vasios)表示,在这项研究之前,人们还不能在没有独立控制每个驱动器的情况下,通过单独的输入线、压力源以及复杂的驱动过程来构建软体机器人。
该项目是人们朝着完全不受约束的简单驱动软体机器人研发迈出的重要一步。
在科技的不断进步下,软体机器人的结构会不断完善,在未来的发展空间越来越广。













